2.1 General Connections and Setup
Important Note: All the commands described in this section are ASCII commands unless called out as standalone commands. ASCII commands are used when communicating over USB or serial communication. Standalone commands are used when writing a standalone program to the Commander core. Not every ASCII command is supported in standalone operations.
< Topic Home | Home | Next Chapter | First Section >
This chapter is broken into the following sections and sub sections;
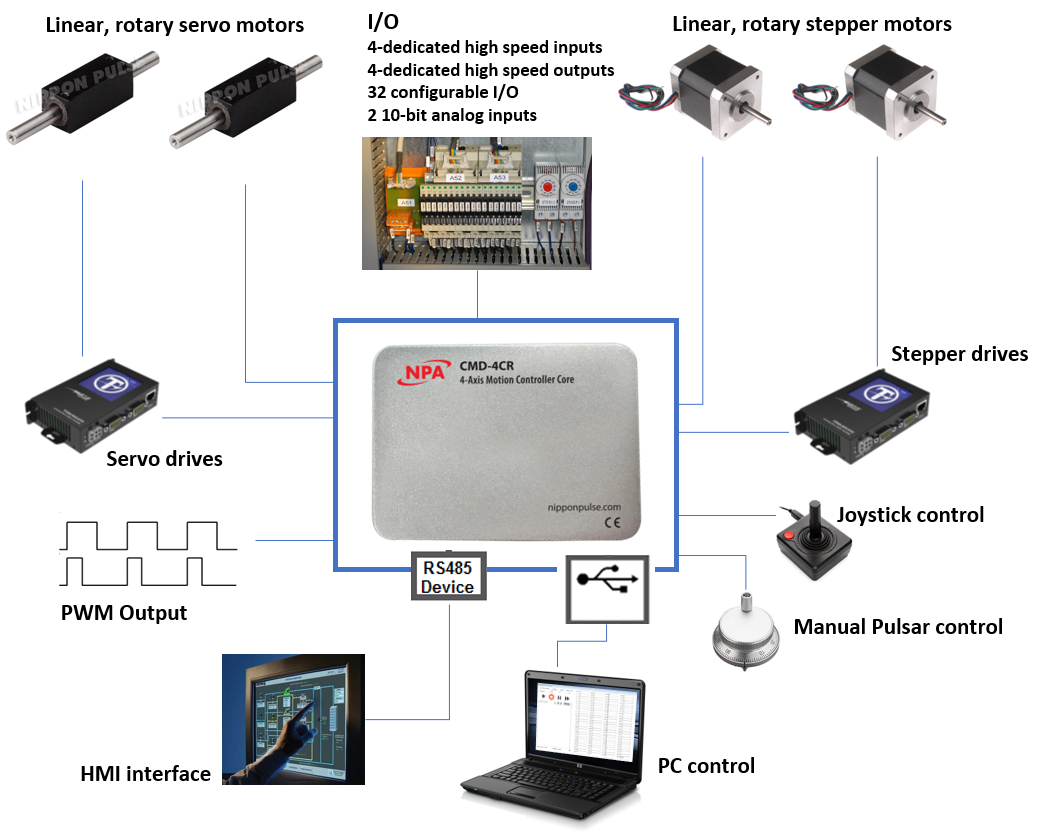
- Connecting multiple Commander cores in a system
- Motor interface
- External Connections
- Dedicated Input/Outputs
- High-speed Inputs/Outputs
- General-purpose input/output
- Motion Profile
- Power-on settings
- System settings
- ERC (deflection counter clear)
- INP (in-position)
- Input modes and the polarity of the input/output logic
- Flash Memory
< Topic Home | Home | Next Chapter | First Section >