2.1.2.1 Stepper
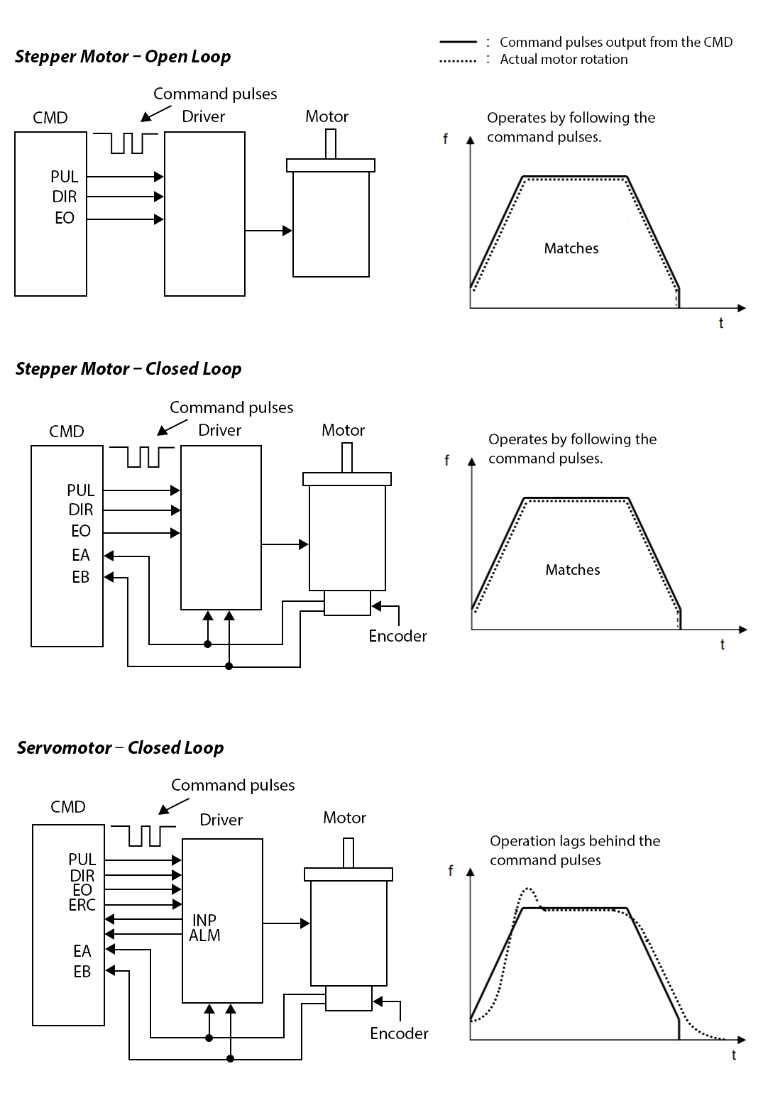 Since a stepper motor operation is synchronized by command pulse signals output from the Commander core (strictly speaking, it follows the pulses), the stepper driver will need the pulse (speed command), direction (direction command), and enable connected. An encoder connection is not required unless you will be using the StepNLoop function; however, there are advantages if an encoder is connected.
Since a stepper motor operation is synchronized by command pulse signals output from the Commander core (strictly speaking, it follows the pulses), the stepper driver will need the pulse (speed command), direction (direction command), and enable connected. An encoder connection is not required unless you will be using the StepNLoop function; however, there are advantages if an encoder is connected.
The pulse (PUL) and direction (DIR) communicate the speed and direction in real-time to the drive. The polarity and output mode of these signals is set with the POL[axis](Bit0~2).
The enable (EO) output is most often used to turn the motor excitation circuit ON/OFF. But, if not required by your driver or application, it can be used as a general-purpose output. The polarity of this output is set with the POL[axis](Bit9).
The figure to the right shows connection examples for both open loop and closed loop stepper systems.
< Section Home | Home | Next SubSection >