2.1.4 Motion Profile
Any motion profile can be plotted as a trapezoid, where time is the base, Velocity is the height, acceleration rate is the angle, and distance is the area.
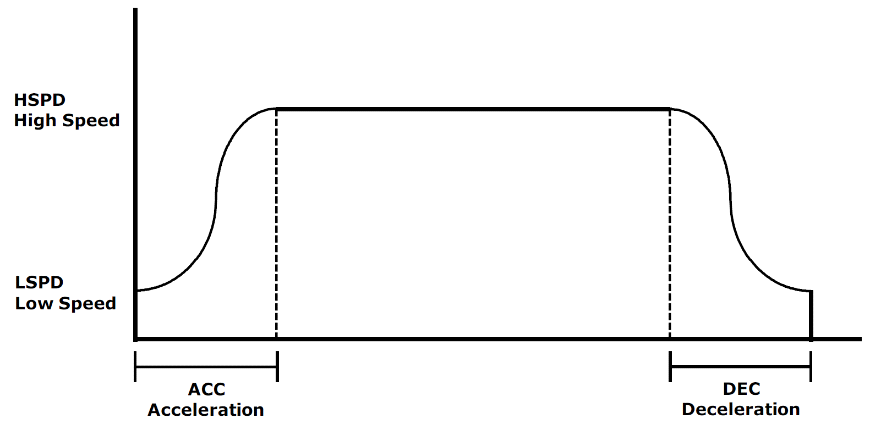
The Commander core uses an S-curve acceleration profile by default, as shown in the figure below. The S-curve acceleration profile reduces jerk, but it requires more power from the motor than a linear acceleration profile when the time for acceleration is the same. Setting SCV[axis] to 1 enables an S-curve for the indicated axis.
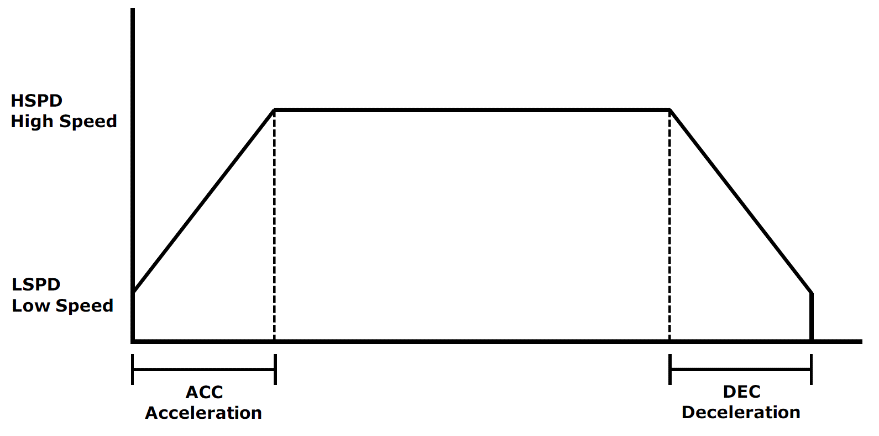
To reduce the power required from the motor, a linear acceleration profile, as shown in the figure below, is possible. Linear acceleration is used when turning S-curve off by setting SCV[axis] to 0.
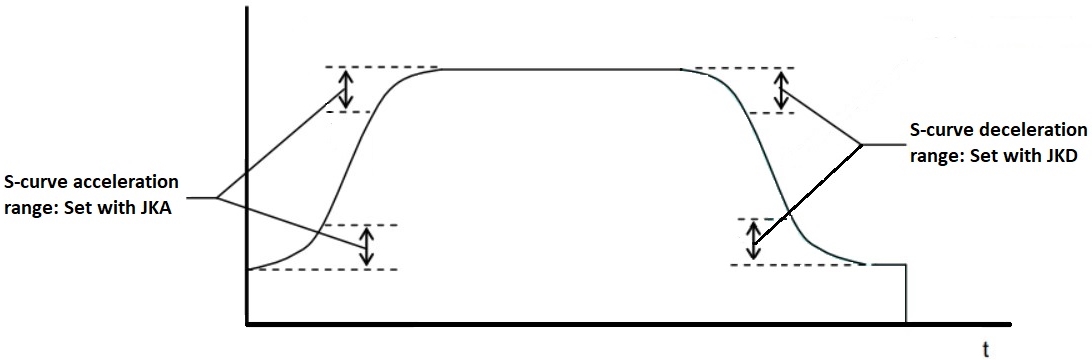
A balance between the amount of jerk and power required from the motor is achieved by combining the S-curve acceleration with linear acceleration in the center. The JKA[axis] command for acceleration and the JKD[axis] command for deceleration set the ratio between S-Curve and linear acceleration. They range from 0 to 100, which is the percentage of the S-curve the profile contains. A setting of 0 is the same as a completely linear profile, and a setting of 100 is the same as a complete S-curve profile.
The axis starts moving at the low-speed setting and accelerates to the high-speed setting for a typical move. Once at high-speed, the motor moves at a constant speed until it decelerates from high to low speed and immediately stops.
Both high and low speeds are in pps (pulses/second). Use the commands HSPD[axis] and LSPD[axis] to set/get individual high-speed and low-speed settings in ASCII and standalone mode. To access the global high-speed and low-speed values, use the ASCII/standalone commands HSPD and LSPD.
Acceleration and deceleration times are in milliseconds. Use the ACC[axis]/DEC[axis] command to set/get individual acceleration/deceleration values. Use the corresponding ACC or DEC command to access the global acceleration/deceleration value. The following formula can calculate the acceleration/deceleration rate in pps2 (pulses/second2).
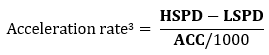
The minimum and maximum acceleration values depend on the high-speed and low-speed settings. Refer to Appendix B: Speed Settings for details. Deceleration time cannot be greater than 2 times acceleration time.
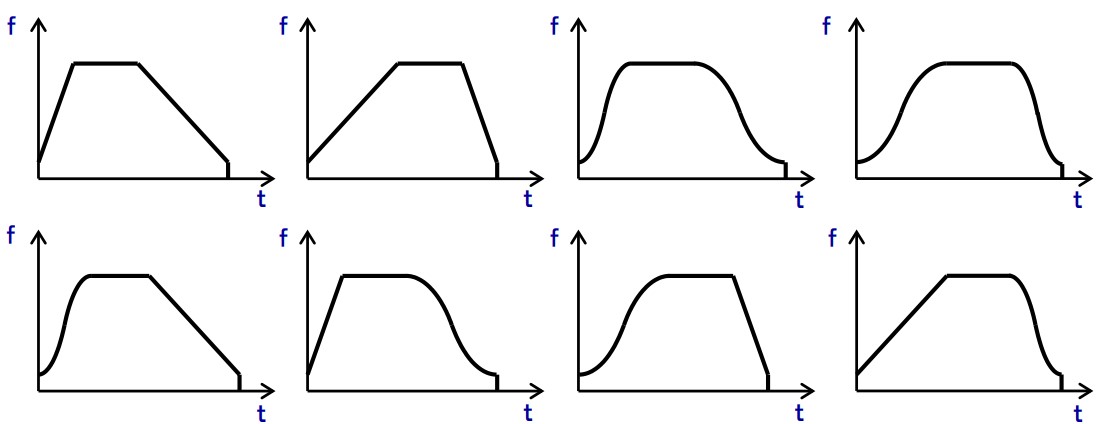
Below are a few examples of styles of motion profile are possible with setting SCV[axis], ACC[axis], DEC[axis], JKA[axis], JKD[axis]. This allows of maximum control of the requested motion profile. The Profile Builder in the Commander Control Software can assist you in determining the correct settings for the commander to achieve your desired profile.
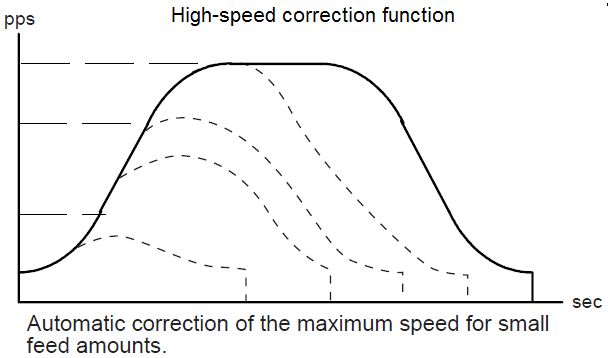 Sometimes it is not possible to reach the high speed requested by the HSPD[axis] command, based on the acceleration, deceleration times and distance commanded. In S-curve mode, the Commander will automatically calculate a new HSPD, only to be used for that move, which allows for the quickest and smoothest possible move for the requested commands.
Sometimes it is not possible to reach the high speed requested by the HSPD[axis] command, based on the acceleration, deceleration times and distance commanded. In S-curve mode, the Commander will automatically calculate a new HSPD, only to be used for that move, which allows for the quickest and smoothest possible move for the requested commands.
Individual speed and acceleration settings will take priority over global settings. A global setting will only be used under the following conditions:
- The corresponding individual setting is defined as zero.
- Coordinated motion is being performed.
|
ASCII |
|||||||||||
|
Standalone |
HSPD |
LSPD |
ACC |
DEC |
HSPD[axis] |
⎯ |
⎯ |
LSPD[axis] |
ACC[axis] |
DEC[axis] |
⎯ |

< Previous Section | Topic Home | Home | Next Section >