2.1.3.1.1 Mechanical input signals
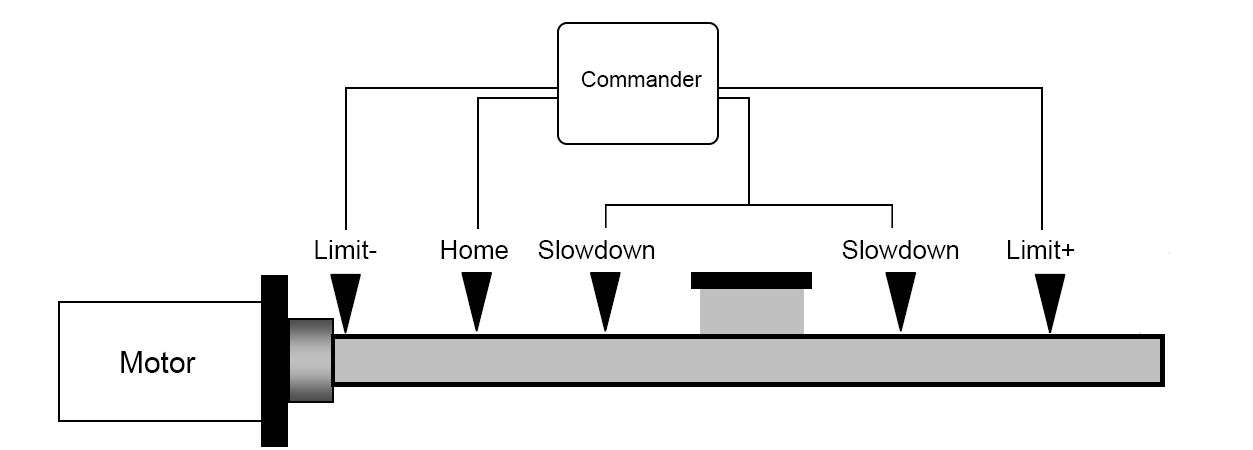
The following four signals can be input for each axis:
- +L (Limit +) When this signal turns ON while operating in the positive direction, the motor stops immediately, or decelerates and stops.
- -L (Limit -) When this signal turns ON while operating in the negative direction, the motor stops immediately, or decelerates and stops.
- SD (Slowdown) Used as a deceleration signal or a deceleration stop signal (set by software).
- H (Home) Input signal for a Homing operation.
The input logic for these signals can be changed with software.
The Commander also has a soft-limit function. The soft-limits can be used in a system where physical limits are impossible, or for setting operation limits within the allowable mechanical stroke limits.
< Section Home | Home | Next | Next SubSection >
This sub-section is broken into the following;
< Section Home | Home | Next | Next SubSection >