ERCD – Deviation Counter Clear Delay
Sets the delay time used between when an error is triggered and when the deviation counter clear signal is turned ON. This setting allows time between when the error is sent from a servo driver and when the servo driver can accept a error clear command.
Applies to: CMD-4CR, CMD-4EX-SA
ASCII ERCD[axis]
Syntax:
Read:
ERCD[axis]
|
Where: [axis] is set to X, Y, Z, U |
Write:
ERCD[axis]=[delay]
|
Where: [axis] is set to X, Y, Z, U [delay] sets the OFF delay time (0-3) 0: 0 us 1: 12 us 2: 1.6 ms 3: 104 ms |
Reply: 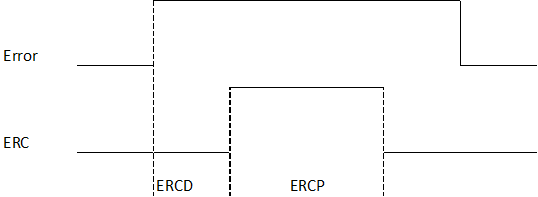
Command is accepted and executed
Read:
Returns the value set for delay time (0-3).
Write:
OK
Command cannot be processed
An error message is returned. See Error Codes
Example:
Read:
ERCDY * Returns the setting for the OFF delay time for the Y-axis
Write:
ERECZ=3 * Sets Z-axis deviation counter clear signal OFF delay time to 104 ms
Notes:
- See picture to understand interaction of error signal, ERC signal and the ERCD and ERCP settings.
See also:
ERC, ERCP, INP, POL, SDC, SDE, EXST, IERR, STORE