INP – Wait for In Position
This command enables or disables the use of the in-position signal, which delays the operation completion status until a driver inputs the in-position signal or positioning completion.
Applies to: CMD-4CR, CMD-4EX-SA
ASCII INP[axis]
Syntax:
Read:
INP[axis]
|
Where: [axis] is set to X, Y, Z, U |
Write:
INP[axis]=[enabled]
|
Where: [axis] is set to X, Y, Z, U [enabled] enables or disables the In-Position function 0 = disabled 1 = enabled |
Reply:
Command is accepted and executed
Read:
Returns 0 or 1 (disabled or enabled)
Write:
OK
Command cannot be processed
An error message is returned. See Error Codes
Example:
Read:
INPY * Returns the enabled status for the Y axis in-position function
Write:
INPU=1 * Enables the in-position function for the U axis.
Notes:
- The key advantage for INP is in servo systems that are operating in a positioning mode.
- For a stepper application there is no need to use the INP input.
- For servo, if the application is a scanning application where position is not critical, then there is no need for INP.
- What is the INP input and how does it work?
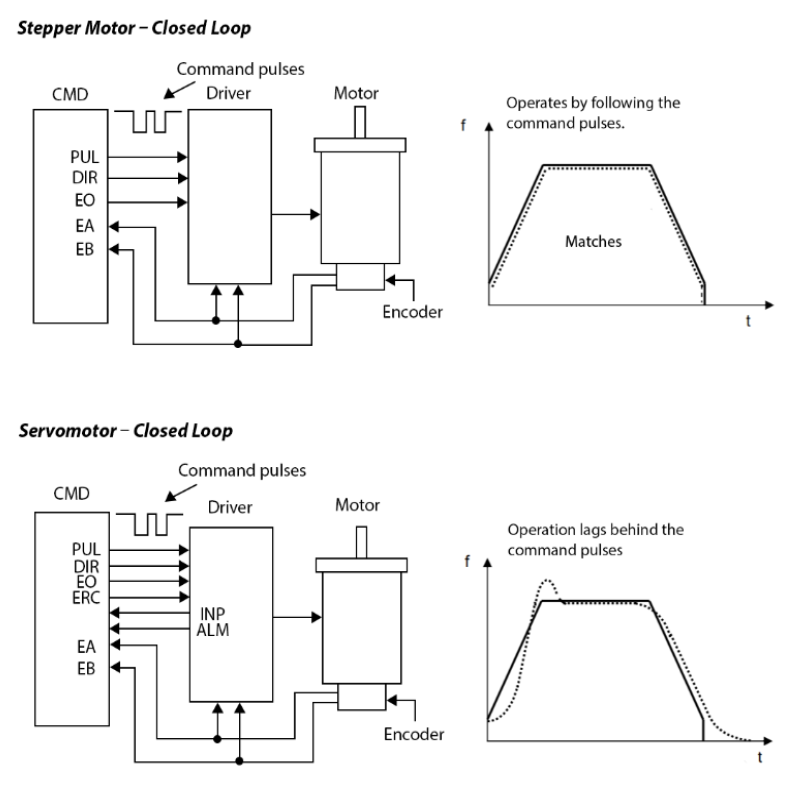
Looking at the picture to the right, notice the difference between the stepper and servo motion profiles. In a servo system there is a lag between where the commanded position is and where the motor actually is.
When you make a motion, without the INP input on (INP[axis]=0) it will show the axis is finished moving as soon as the command pulses are finished being sent, and the next command can be accepted by the controller.
When you make a motion, with the INP input on (INP[axis]=1) it will show the axis is finished moving after the command pulses are finished being sent, and then the INP input is triggered active. (MST [axis] bit 11).
See also:
ERC, ERCD, ERCP, POL, SDC, SDE, EXST, IERR