JTOL – Joystick Deadzone
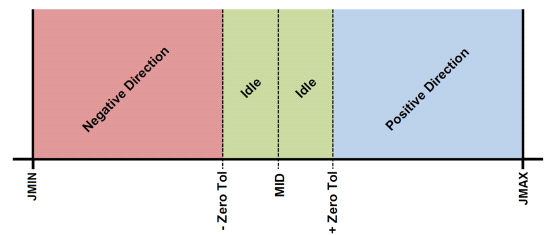
Sets the invalid range voltage value of the analog input voltage terminal (dead zone) for joystick operations. The dead zone is the voltage range where the joystick operation is stopped. The range is determined by adding or subtracting JTOL from the midpoint (Mid) of the joystick voltage range.
Applies to: CMD-4CR, CMD-4EX-SA
ASCII JTOL
Syntax:
Read:
JTOL[axis]
|
Where: [axis] is set to X or Y |
Write:
JTOL[axis]=[volt]
|
Where: [axis] is set to X or Y [volt] specifies the invalid voltage range above and below midpoint in mV |
Reply:
Command is accepted and executed
Read:
Returns the current set midpoint voltage in mV
Write:
OK
Command cannot be processed
An error message is returned. See Error Codes
Example:
Read:
JTOLX * Returns the set dead zone voltage tolerance for X axis
Write:
JTOLY=50 * Sets the dead zone tolerance to 50 mV for the Y axis.
Notes:
- The ASCII command JTOL[axis] can be used to define the zero-tolerance (or dead) zone around the MID value. No movement will occur while the analog input value is within the zero-tolerance zone. This parameter has units of millivolts (mV) and a range of 0 to 3300. The zero-tolerance parameter will be on the positive and negative side of the MID point to define to the zero-tolerance zone. See the figure below for details.
- Example: The zero-tolerance zone at JMAX = 3,250 mV, JMIN = 10 mV, JTOL = 50 mV will be

- 1580 mV ~ 1680 mV since ((3,250 – 10) ÷ 2) +10 = 1,630 mV
- 1,630 mV ±50 mV
See also:
JSPD, JDEL, JMAX, JMIN, JENA, JLIM, AI