Motion Settings
Any given motion profile can be plotted as a trapezoid, where Time is the base, Velocity is the height, acceleration rate is the angle and Distance is the area.
By default, the Nippon Pulse controllers use a linear acceleration profile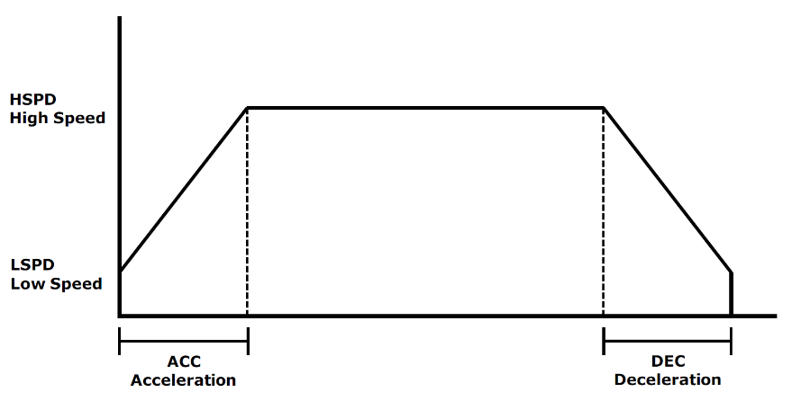 as shown below. To reduce jerk, an S-curve acceleration profile (SCV)
as shown below. To reduce jerk, an S-curve acceleration profile (SCV)  can also be used. The percentage of S-curve can also be adjusted (JKA, JKD).
can also be used. The percentage of S-curve can also be adjusted (JKA, JKD).
For a typical move, the axis will start moving at the low-speed setting (LSPD) and accelerate (ACC) to the high-speed setting (HSPD). Once at high-speed, the motor will move at a constant speed until it decelerates (DEC) from high-speed to low-speed and immediately stops.
The motion profile can be performed as an absolute move (ABS) from a homed location or incremental move (INC) from the current position. The MM command can be used to determine the current move mode of the controller.
For more information on the settings, see the following sections in the Commander manual:
|
Command |
Description |
Available with: |
Link |
|||||
|
ASCII |
Standalone |
CMD-4CR |
PMX-4EX |
PMX-4ET |
PMX-2ED |
PMX-2EX |
||
|
ABS |
ABS |
Absolute position coordinate mode |
● |
● |
● |
● |
● |
|
|
ACC |
ACC |
Acceleration time in ms |
● |
● |
● |
● |
● |
|
|
DEC |
DEC |
Deceleration time in ms |
● |
● |
● |
● |
● |
|
|
HSPD |
HSPD |
High speed setting |
● |
|
|
● |
● |
|
|
HS |
HSPD |
|
● |
● |
|
|
||
|
INC |
INC |
Incremental position coordinate mode |
● |
● |
● |
● |
● |
|
|
JKA |
-- |
Jerk control for acceleration in % |
● |
|
|
|
|
|
|
JKD |
-- |
Jerk control for deceleration in % |
● |
|
|
|
|
|
|
LSPD |
LSPD |
Low speed setting |
● |
|
|
● |
● |
|
|
LS |
LSPD |
|
● |
● |
|
|
||
|
MM |
-- |
Position coordinate mode status |
● |
|
● |
● |
● |
|
|
SCV |
SCV |
S-curve acceleration enable/disable |
● |
● |
● |
● |
● |
|
The black dots indicate the command is available for the listed controller family.