JMAX – Joystick Maximum Voltage
The JMAX[axis] command can be used to define the maximum analog input value for the specified axis. This parameter has units of millivolts (mV) and a range of 0 to 3300. This value will define the analog input value in which the maximum joystick speed occurs in the positive direction. This command is only available in ASCII mode.
Applies to: CMD-4CR, CMD-4EX-SA, PMX-4EX-SA, PMX-4ET-SA, PMX-2ED-SA, PMX-2EX-SA
ASCII JMAX
Syntax:
Read:
JMAX[axis]
|
Where: [axis] is set to X or Y |
Write:
JMAX[axis]=[volt]
|
Where: [axis] is set to X or Y [volt] specifies the maximum voltage to the analog terminal in mV. Range from 0 – 3300 |
Reply:
Command is accepted and executed
Read:
Returns the current set maximum voltage in mV
Write:
OK
Command cannot be processed
An error message is returned. See Error Codes
Example:
Read:
JMAXX * Returns the value of the maximum voltage on the X-axis analog terminal.
Write:
JMAXY=3300 * Sets the maximum voltage value to 3300 mV for the Y-axis analog terminal.
Notes:
- The ASCII command JTOL[axis] can be used to define the zero-tolerance (or dead) zone around the MID value. No movement will occur while the analog input value is within the zero-tolerance zone. This parameter has units of millivolts (mV) and a range of 0 to 3300. The zero-tolerance parameter will be on the positive and negative side of the MID point to define to the zero-tolerance zone. See the figure below for details.
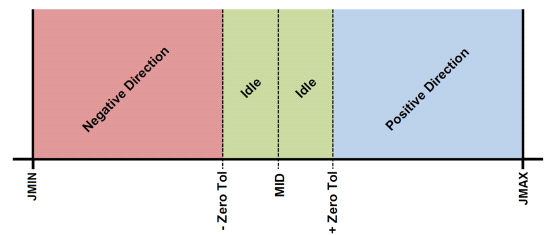
- Example: The zero-tolerance zone at JMAX = 3,250 mV, JMIN = 10 mV, JTOL = 50 mV will be

- 1580 mV ~ 1680 mV since ((3,250 – 10) ÷ 2) +10 = 1,630 mV
- 1,630 mV ±50 mV
See also:
JSPD, JDEL, JMIN, JTOL, JENA, JLIM, AI