JKD – Jerk Control Deceleration
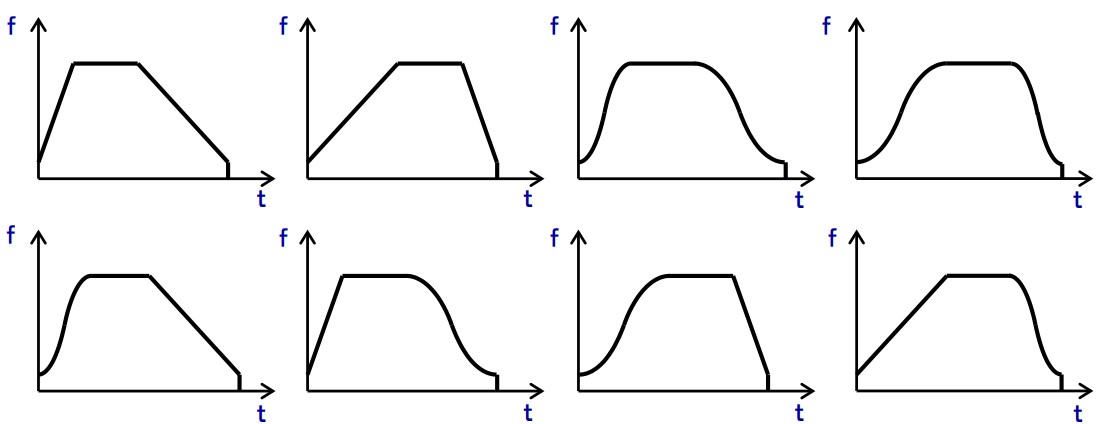
The JKD[axis] command for deceleration sets the ratio between S-Curve and linear deceleration. The percentage of S-curve the profile contains can be set, with a range from 0 to 100. A setting of 0 is the same as a complete linear profile, and a setting of 100 is the same as a complete S-curve profile.
Applies to: CMD-4CR, CMD-4EX-SA, PMX-4EX-SA, PMX-4ET-SA, PMX-2ED-SA, PMX-2EX-SA
ASCII JKD
Syntax:
Read:
JKA[axis]
|
Where: [axis] is set to X, Y, Z, U |
Write:
JKA[axis]=[percent]
|
Where: [axis] is set to X, Y, Z, U [percent] is the percentage of the S-curve the profile contains (0 - 100) |
Reply:
Command is accepted and executed
Read:
Returns the percentage of the S-curve the profile contains.
Write:
OK
Command cannot be processed
An error message is returned. See Error Codes
Example:
Read:
JKDY * Returns the percentage of the S-curve the Y axis profile deceleration contains.
Write:
JKDX=0 * Sets the X axis profile deceleration to 0% S-curve (linear)
Notes:
- When S-curve is disabled, linear acceleration/deceleration is used.
- When S-curve is enabled, changing jerk acceleration (JKA) and jerk deceleration (JKD) allows for fine-tuning of the S-curve profile.
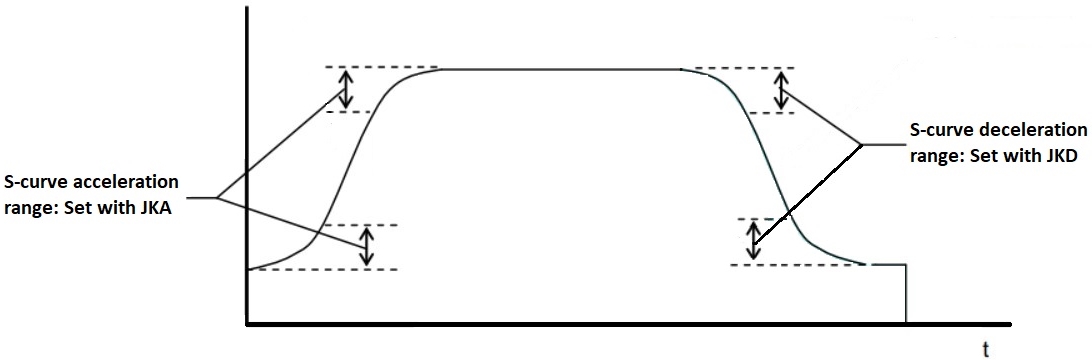
- It is possible to set mixed acceleration/deceleration types in a single profile. Changing the jerk acceleration (JKA) or jerk deceleration (JKD) to 0 makes the acceleration/deceleration linear.
See also:
ACC, DEC, HSPD, JKA, LSPD, PS, SCV, SSPDM