Soft-Limits
End limits are frequently used to detect the mechanical stroke limits. The Commander also has a soft-limit function. The soft-limits can be used in a system where physical limits are impossible, or for setting operation limits within the allowable mechanical stroke limits.

The soft-limit function uses a comparator for a positive direction limit (SFLP[axis]) and a second comparator for a negative direction limit (SFLN[axis]) to stop the axis based on the axis position related to the comparator's results and the operation direction. The SFLSO[axis] command selects the encoder counter (1) or pulse generator counter (0) for the soft-limit axis position. It is safest to use the encoder counter, if an encoder is available, as it will allow the tracking of the motor even if an outside force moves the motor.
When the soft-limit function is enabled, the axis stops immediately when the motor reaches the soft-limit setting at the low-speed setting (LSPD). At the high-speed setting (HSPD), then stopping is executed based on the setting of the SFLSD[axis].
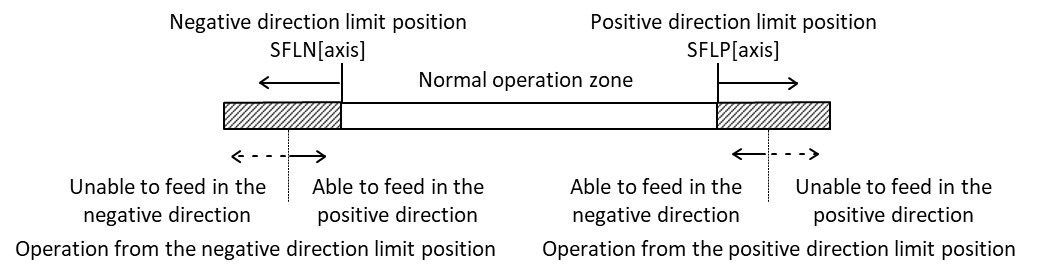
While deceleration stop is selected as the process when soft-limit triggered (SFLSD[axis]=1), when the axis reaches the soft-limit while at high-speed, that axis stops using deceleration at the rate set by DEC. When some other process is specified (SFLSD[axis]=0), or while in a constant (low) speed, that axis stops immediately. While the axis is at or beyond the soft-limit setting, the axis can not be moved in the direction in which the soft-limit is enabled. However, it can move in the opposite direction.
Once the parameters are set, the soft-limit function can be enabled by setting SFL[axis]=1 and disabled by setting SFL[axis]=0.