2.5.1.3 Position control
Joystick control also has soft limits, which are defined by a negative outer limit, negative inner limit, positive inner limit, and a positive outer limit, using the JLIM[number] command. The soft limits are in units of pulses.
When moving in a positive direction, as soon as the positive inner limit is crossed, the speed is reduced. Speed will continue to decline as the position moves closer to the outer limit value. If the position reaches the positive outer limit, the joystick speed is set to zero and movement in the positive direction is prohibited. The same behavior is applicable to the negative direction and negative limits.
The figure below represents the relationship between the joystick speed and inner and outer limits.
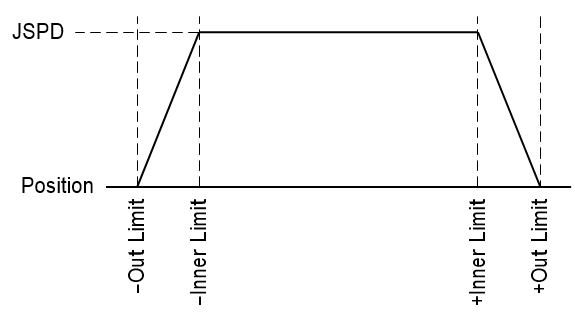
Table JLIM command below shows the command assignment of the negative and positive soft limits for joystick control, as well as a summary of the additional joystick commands.
|
Command |
Description |
|
JLIM1 |
X-axis negative outer limit |
|
JLIM2 |
X-axis negative inner limit |
|
JLIM3 |
X-axis positive inner limit |
|
JLIM4 |
X-axis positive outer limit |
|
JLIM5 |
Y-axis negative outer limit |
|
JLIM6 |
Y-axis negative inner limit |
|
JLIM7 |
Y-axis positive inner limit |
|
JLIM8 |
Y-axis positive outer limit |
JLIM command
This limit value is based on the value "0" of the command pulse counter. If a stop command is issued while a joystick operation is active, it will return an invalid status.
|
ASCII |
||||||
|
Standalone |
JOYENA |
⎯ |
⎯ |
⎯ |
⎯ |
⎯ |
Operating procedure
If there is no change in the previous set data, operation 1 below is not necessary.
- Set all the joystick operation values
- Enable joystick operation with JENA command
- Move the axis by operating the joystick
- Disable the joystick operation at the end of the operation
Operating conditions
- Joystick operation is disabled
- MPG operation is disabled
- Operation is stopped
- The error status is clear
Related communications commands
JSPD, JDEL, JMAX, JMIN, JTOL, JENA, JLIM, AI, MST
< Previous SubSection | Topic Home | Home >