Appendix A: Homing Mode Actions
Commander core has 13 homing search methods, utilizing home limit, end of travel limit, slowdown inputs, or Z-index pulse, or combinations of these to complete a homing operation. Homing is used to establish a zero or home position to use as a reference for absolute motion actions. Some homing methods will stop in a non-zero position, using the position at which the home, end of travel, or Z-index pulse was triggered as the zero-reference position.
The chart below indicates which type of limits are used in each mode, along with home approach speed, direction and end-point status.
● indicates input required, ○ indicates input optional.
|
Homing Mode |
Home |
End Limits |
Z-index |
Slow Down |
Approaches Home at |
Direction to Trigger Zero |
Ending Point |
|
|
High Speed |
Low Speed |
|||||||
|
● |
|
|
○ |
H |
|
Dir of Home |
Non-Zero |
|
|
● |
|
|
○ |
|
L |
Dir of Home |
Zero |
|
|
● |
|
● |
○ |
|
L |
Dir of Home |
Zero |
|
|
● |
|
● |
○ |
H |
|
Dir of Home |
Non-Zero |
|
|
● |
|
● |
○ |
|
L |
Reverse Dir |
Zero |
|
|
● |
|
● |
○ |
H |
|
Reverse Dir |
Non-Zero |
|
|
|
● |
|
○ |
H |
|
Reverse Dir |
Zero |
|
|
|
● |
● |
○ |
|
L |
Reverse Dir |
Zero |
|
|
|
● |
● |
○ |
H |
|
Reverse Dir |
Non-Zero |
|
|
● |
|
|
○ |
H |
|
Reverse Dir |
Zero |
|
|
● |
|
● |
○ |
H |
|
Reverse Dir |
Zero |
|
|
● |
|
● |
○ |
H |
|
Dir of Home |
Zero |
|
|
|
● |
● |
○ |
H |
|
Dir of Home |
Zero |
|
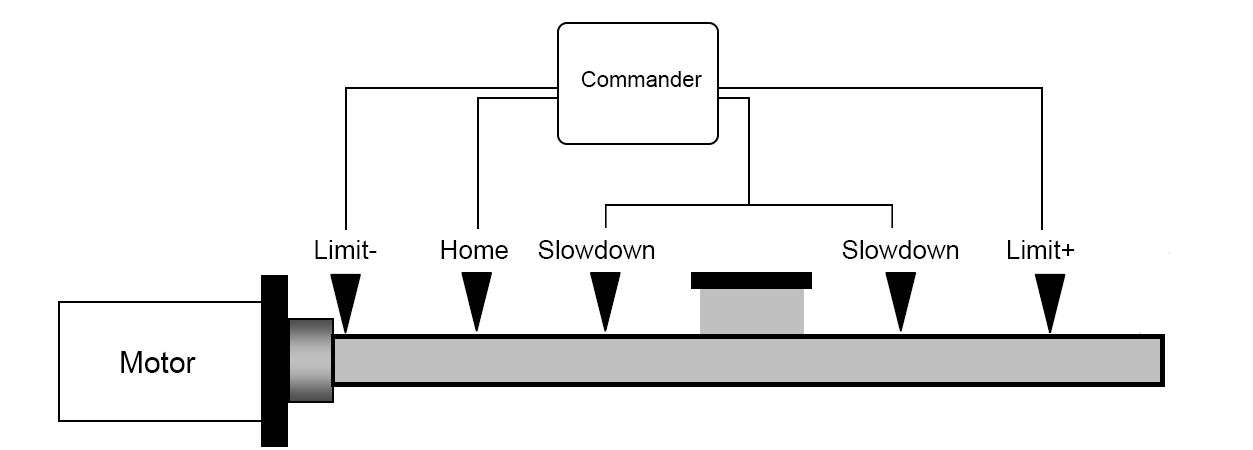
Homing inputs
Consider the system mechanics carefully when setting up limit switches, using caution to set the limits for the appropriate axis movement and considering the deceleration distance when establishing end of travel limits relative to the hard stop positions.
Note: For homing modes 9 – 12, encoder feedback is required. When using a stepper motor and homing with modes 9 – 12, an encoder is required and the command pulse count and encoder pulse count must be equal.
More information on the homing modes can be found in Section 9-5-1 of the PCL6045BL users manual.
< Previous Topic | Home | Next Topic | First Chapter >