A.11 Homing Mode 10
Homing mode 10 uses both the home limit switch and Z-index pulse. Deceleration occurs after the move passes through the home limit switch and encounters the Z-index pulse. The operation continues with a quick index back to the position where the Z-index pulse was encountered.
- This is the similar to Homing mode 3 except it returns to the encoder 0 point, after the home limit is encountered. If your system does not have an encoder, or the encoder pulse count is different from the motor pulse count, it is suggested that you use Homing mode 3 instead, as Homing mode 10 will not function properly.
|
Homing Mode |
Home Limit |
End Limits |
Z-index |
Slow Down |
Approaches Home at |
Direction to Trigger Zero |
Ending Point |
|
|
High Speed |
Low Speed |
|||||||
|
Mode 10 |
● |
|
● |
○ |
H |
|
Reverse Dir |
Zero |
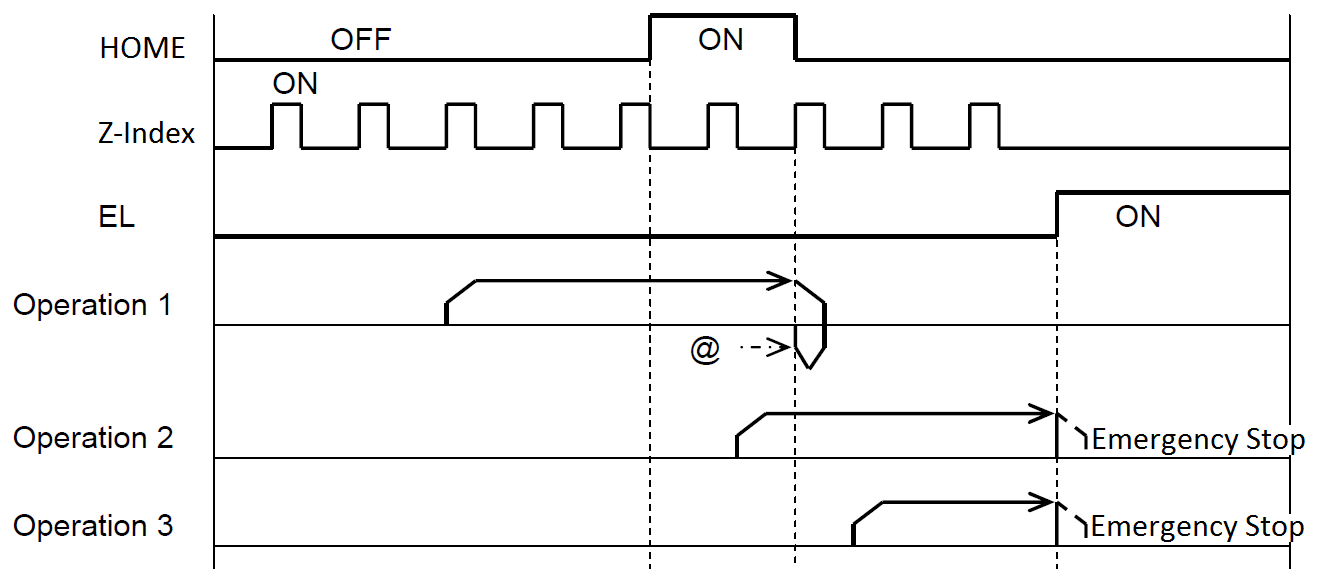
Operation 1:
- Homing operation is started, accelerate from LSPD to HSPD.
- Continue moving at HSPD as the home limit switch is encountered.
- Deceleration begins when specified number of Z-index pulses is encountered (ZCNT), zero set.
- At end of deceleration, a zero-point return operation begins to the position where Z-index pulse was encountered, accelerating from LSPD to HSPD and decelerating and stopping at 0 position.
- Homing is completed when the 0 position is reached.
- ERC pulse is sent.
Operation 2:
- Homing is started while home input is activated.
- Acceleration from LSPD to HSPD.
- End limit is encountered, immediate stop.
Operation 3:
- Homing is started moving away from the home input switch.
- Acceleration from LSPD to HSPD.
- End limit is encountered, immediate stop.
Note: For homing modes 9 – 12, encoder feedback is required. When using a stepper motor and homing with modes 9 – 12, an encoder is required and the command pulse count and encoder pulse count must be equal.
< Previous Chapter | Topic Home | Home | Next Chapter >