2.2.4 Positioning operation
Unlike a Jog operation, a Positioning operation is a move with a specified stop point. The stop point will be either an absolute position in relation to the 0 start point, which was defined during homing, or an incremental position from the motor’s current position.
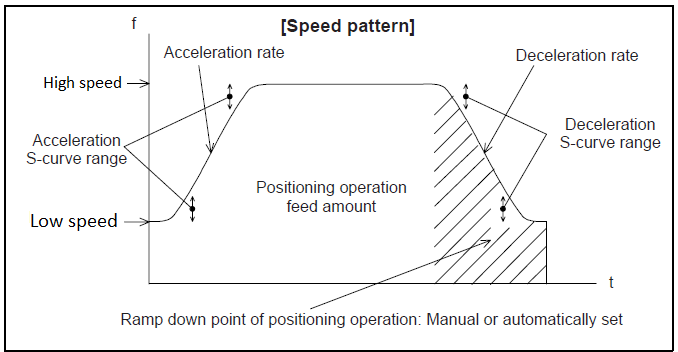 The motor will start moving at the defined low speed, then will accelerate based on the acceleration time and type, to the final defined high speed. Once it gets close to the stop point, it will decelerate as defined by the deceleration time and type to the defined low speed, then the motor will stop.
The motor will start moving at the defined low speed, then will accelerate based on the acceleration time and type, to the final defined high speed. Once it gets close to the stop point, it will decelerate as defined by the deceleration time and type to the defined low speed, then the motor will stop.
At any time while the motor is moving, the specified stop point can be adjusted by using the on-the-fly target position change command, and the speed at which it is moving can be adjusted by using the on-the-fly speed change command.
In addition, the motor will stop without completing the defined positioning operation if a limit input is activated during the move or a STOP/ABORT command is issued.
The Commander core can perform positional moves for individual axes, multiple axes, or linear coordinated motion.
< Previous Section | Topic Home | Home | Next Section | First SubSection >
This section is broken into the following sub sections:
< Previous Section | Topic Home | Home | Next Section | First SubSection >