Homing Mode 12
Homing Mode 12
Homing mode 12 is similar to homing mode 11, except it utilizes the end of travel limit to initiate an immediate stop before it makes a fast move back to the Z-index pulse, where a quick index reverses motion back to the position where the Z-index pulse was encountered.
|
Homing Mode |
Home Limit |
End Limits |
Z-index |
Slow Down |
Approaches Home at |
Direction to Trigger Zero |
Ending Point |
|
|
High Speed |
Low Speed |
|||||||
|
Mode 12 |
|
● |
● |
○ |
H |
|
Dir of Home |
Zero |
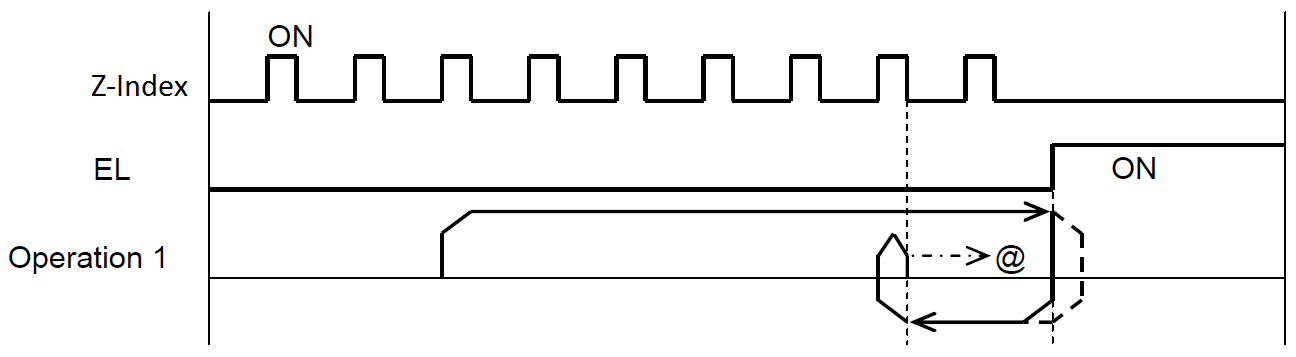
Operation 1:
- Homing operation is started, accelerate from LSPD to HSPD.
- Immediate stop on encountering end of travel limit switch.
- Reverse direction, accelerating from LSPD to HSPD.
- Deceleration begins when specified number of Z-index-pulses is encountered (ZCNT), zero position is set.
- Start a zero-point return move to the position where the Z-index pulse was encountered, accelerating from LSPD to HSPD then decelerating and stopping at 0 position.
- Homing is completed when the 0 position is reached.
- ERC pulse is sent.
NOTE: For homing modes 9 – 12, encoder feedback is required. When using a stepper motor and homing with modes 9 – 12, an encoder is required and the command pulse count and encoder pulse count must be equal.
More information on the homing modes can be found in Section 9-5-1 of the PCL6045BL users manual.