Homing Mode 11
Homing Mode 11
In homing mode 11, the home limit switch is used to initiate a deceleration. The operation then continues with a fast move in the reverse direction until the Z-index pulse is encountered, where a quick index reverses motion back to the position where the Z-index pulse was encountered.
|
Homing Mode |
Home Limit |
End Limits |
Z-index |
Slow Down |
Approaches Home at |
Direction to Trigger Zero |
Ending Point |
|
|
High Speed |
Low Speed |
|||||||
|
Mode 11 |
● |
|
● |
○ |
H |
|
Dir of Home |
Zero |
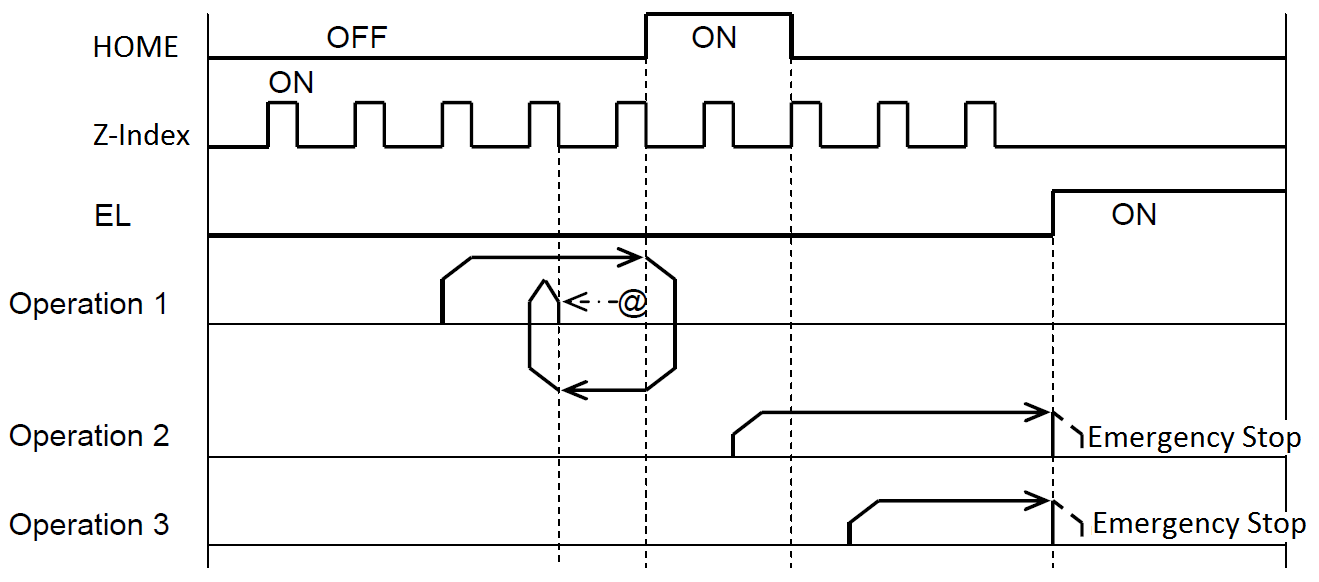
Operation 1:
- Homing operation is started, accelerate from LSPD to HSPD, then decelerate as the home limit switch is encountered.
- Reverse direction, accelerating from LSPD to HSPD, then decelerate when specified number of Z-index-pulses is encountered (ZCNT), zero position is set.
- Start a zero-point return move to the position where the Z-index pulse was encountered, accelerating from LSPD to HSPD then decelerating and stopping at 0 position.
- ERC pulse is sent.
Operation 2:
- Homing is started while home input is activated.
- acceleration from LSPD to HSPD.
- End limit is encountered, immediate stop.
Operation 3:
- Homing is started moving away from the home input switch.
- acceleration from LSPD to HSPD.
- End limit is encountered, immediate stop.
NOTE: For homing modes 9 – 12, encoder feedback is required. When using a stepper motor and homing with modes 9 – 12, an encoder is required and the command pulse count and encoder pulse count must be equal.
More information on the homing modes can be found in Section 9-5-1 of the PCL6045BL users manual.