CMD/PMX Homing Mode 0 [H[axis][+/-]]
Home Mode 0 is available with Slow Down (SD) switch or without SD switch.
This Home Mode is available with low-speed operation mode 16 on the Commander series.
Homing mode 0 without Slow Down (SD) disabled.
Applies to: CMD-4CR, CMD-4EX-SA, PMX-4EX-SA, PMX-4ET-SA, PMX-2ED-SA, PMX-2EX
This homing method works with a home limit switch input and sets home when the motion stops after the home limit switch is encountered.
|
Series |
Homing Mode |
Home Limit |
End Limits |
Z-index |
Slow Down |
Approaches Home at |
Direction to Trigger Zero |
Ending Point |
|
|
High Speed |
Low Speed |
||||||||
|
CMD all PMX-4EX-SA PMX-4ET-SA |
Mode 0 |
● |
|
|
○ |
H |
|
Dir of Home |
Non-Zero |
|
PMX-2ED-SA PMX-2EX-SA |
H[axis][+/-] |
● |
|
|
|
H |
|
Dir of Home |
Non-Zero |
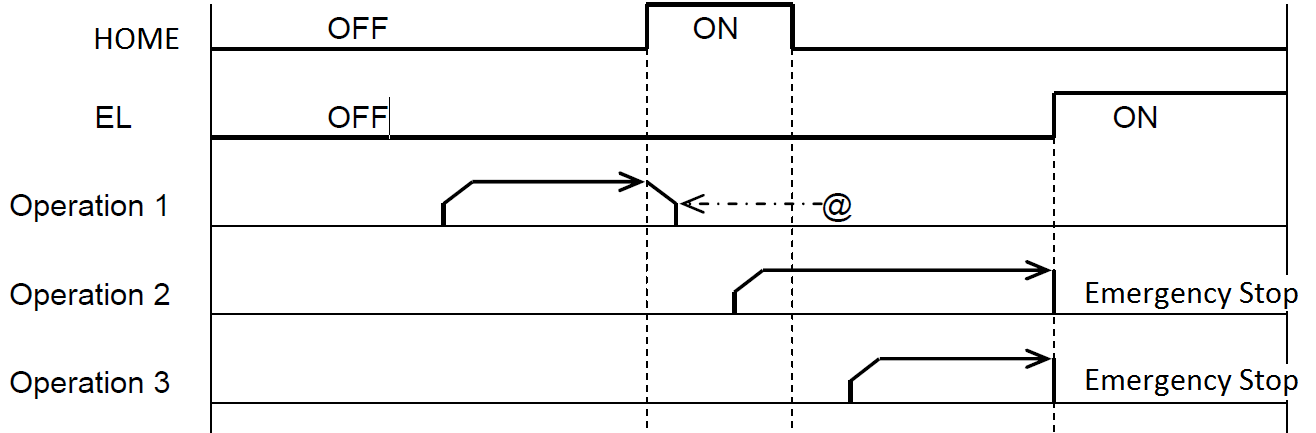
Operation 1:
- Homing is started toward home switch, accelerate from LSPD to HSPD.
- Deceleration starts when the home (ORG) input point is detected, zero position is set.
- Homing is complete when deceleration stops.
- ERC pulse is sent. (CMD only)
Operation 2:
- Homing is started while home input is activated.
- Acceleration from LSPD to HSPD.
- End limit is encountered, immediate stop.
Operation 3:
- Homing is started moving away from the home input switch.
- Acceleration from LSPD to HSPD.
- End limit is encountered, immediate stop.
More information on the homing modes can be found in Section 9-5-1 of the PCL6045BL users manual.
Homing mode 0 with Slow Down (SD) enabled.
Applies to: CMD-4CR, CMD-4EX-SA
In this homing mode, an input will first trigger a deceleration to a lower speed point and then stops and sets home as the home limit switch is reached.
|
Homing Mode |
Home Limit |
End Limits |
Z-index |
Slow Down |
Approaches Home at |
Direction to Trigger Zero |
Ending Point |
|
|
High Speed |
Low Speed |
|||||||
|
Mode 0 |
● |
|
|
● |
|
L |
Dir of Home |
Non-Zero |
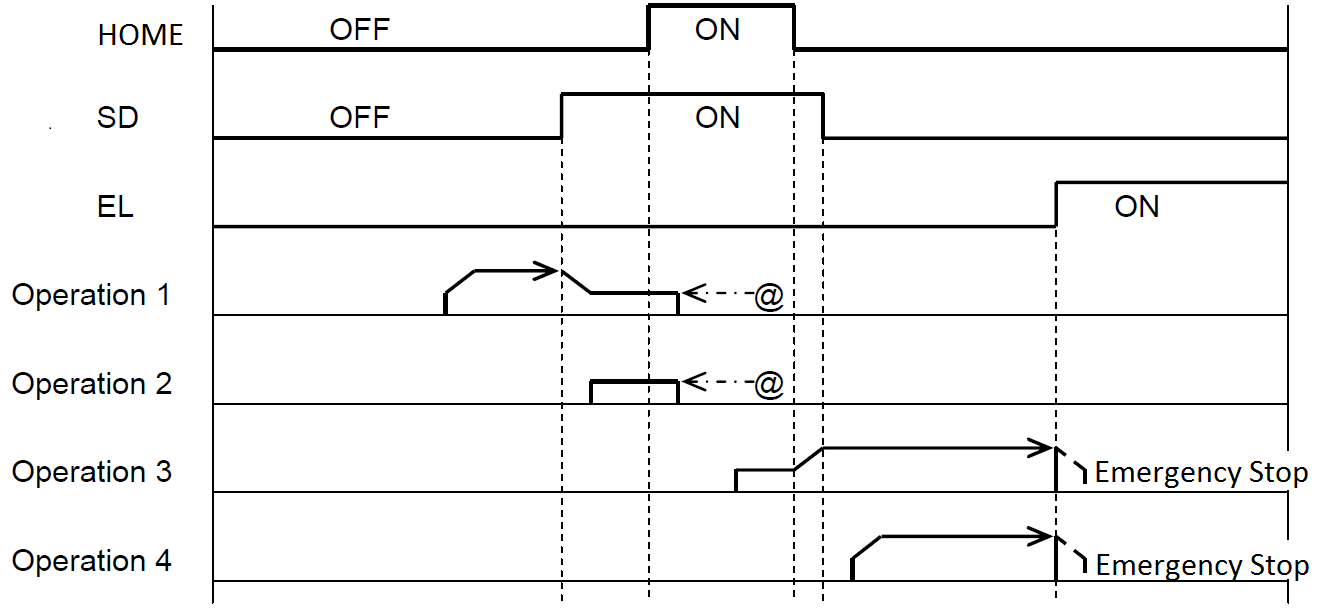
Operation 1:
- Homing is started toward home switch, accelerate from LSPD to HSPD.
- Deceleration starts to LSPD when the SD input point is detected, continue towards home.
- Stop when home input is detected, homing complete.
- ERC pulse is sent.
Operation 2:
- Homing is started while SD input is activated.
- Continue traveling at LSPD towards home input.
- Stop when home input is detected, zero position is set, homing complete.
- ERC pulse is sent.
Operation 3:
- Homing is started while SD input is activated and is moving away from the home input switch.
- Travel at LSPD until SD input is deactivated, then accelerate from LSPD to HSPD.
- End limit is encountered, immediate stop.
Operation 4:
- Homing is started moving away from the home input switch and SD limit is deactivated.
- Acceleration from LSPD to HSPD.
- End limit is encountered, immediate stop.
More information on the homing modes can be found in Section 9-5-1 of the PCL6045BL users manual.
Homing mode 16 (Homing mode 0 at low-speed)
Applies to: CMD-4CR, CMD-4EX-SA V129+
This homing method works with a home limit switch input and sets home when the motion stops after the home limit switch is encountered.
|
Homing Mode |
Home Limit |
End Limits |
Z-index |
Slow Down |
Approaches Home at |
Direction to Trigger Zero |
Ending Point |
|
|
High Speed |
Low Speed |
|||||||
|
Mode 16 |
● |
|
|
● |
|
L |
Dir of Home |
Non-Zero |

Operation 1:
- Homing is started toward home switch, at LSPD.
- Motion stops when the home (ORG) input point is detected, zero position is set.
- Homing is complete when motion stops.
- ERC pulse is sent. (CMD only)
Operation 2:
- Homing is started while home input is activated.
- Motion is at LSPD.
- End limit is encountered, immediate stop.
Operation 3:
- Homing is started moving away from the home input switch.
- Motion is at LSPD.
- End limit is encountered, immediate stop.
More information on the homing modes can be found in Section 9-5-1 of the PCL6045BL users manual.