B.2 Acceleration/Deceleration Range – Positional Move
When dealing with positional moves, the controller automatically calculates the appropriate acceleration and deceleration based on the following rules:
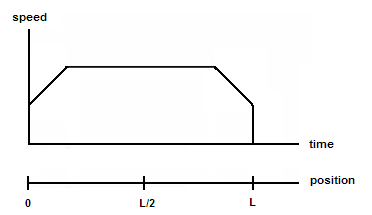
- ACC vs. DEC 1: If the theoretical position where the controller begins deceleration is less than L/2, the acceleration value is used for both ramp up and ramp down.
- ACC vs. DEC 2: If the theoretical position where the controller begins constant speed is greater than L/2, the acceleration value is used for both ramp up and ramp down.
- Triangle Profile: If either (1) or (2) occur, the velocity profile becomes triangle. Maximum speed is reached at L/2.
< Previous Chapter | Topic Home | Home | Next Topic >