2.2.2 Jog operation
A jog move is used to continuously move the motor without stopping. Use the J[axis]+/J[axis]- command when operating in ASCII mode, and the JOG[axis]+/JOG[axis]- in standalone mode.
The Commander core will output pulses to move the motor immediately upon receipt of the command. Any number of motors can be moved independently at the same time.
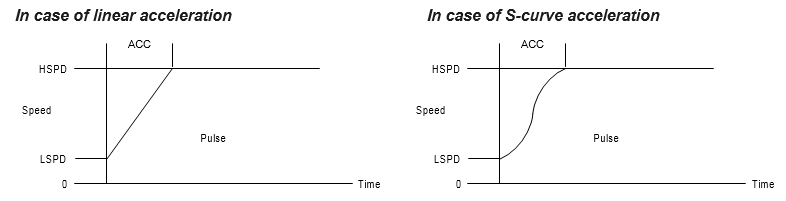
The motor will start moving at the defined low speed, then will accelerate as defined by the acceleration time and type, to the final defined high speed.
Once this move is started, the speed can be adjusted by using the on-the-fly speed change command; however, the motor will only stop if a limit input is activated during the move or a STOP command is issued.
If a motion command is sent while the controller is already moving, the command will not be processed. Instead, an error response is returned. See table 4.2 Error Codes for details on error responses.
|
ASCII |
|
|
Standalone |
JOG[axis][+/-] |
Operating procedure
If there is no change in the previous set data, the operation 1 below is not necessary.
- Set the operating speeds
- Issue the J command
- Issue stop command
Operating conditions
- Joystick operation is disabled
- MPG operation is disabled
- Operation is stopped
- The error status is clear
Related commands:
LSPD, HSPD, ACC, DEC, J, SCV, STOP, ABORT, ESTOP, MST
< Previous Section | Topic Home | Home | Next Section >